Publications
O. Dantsker, M. Theile, M. Caccamo, and R. Mancuso, "Design, Development, and Initial Testing of a Computationally-Intensive, Long-Endurance Solar-Powered Unmanned Aircraft"
in AIAA Aviation and Aeronautics Forum and Exposition, Atlanta, GA, USA, June, 2018.
pdf
O. Dantsker, M. Vahora, S. Imtiaz, and M. Caccamo "High Fidelity Moment of Inertia Testing of Unmanned Aircraft"
in AIAA Aviation and Aeronautics Forum and Exposition, Atlanta, GA, USA, June, 2018.
pdf
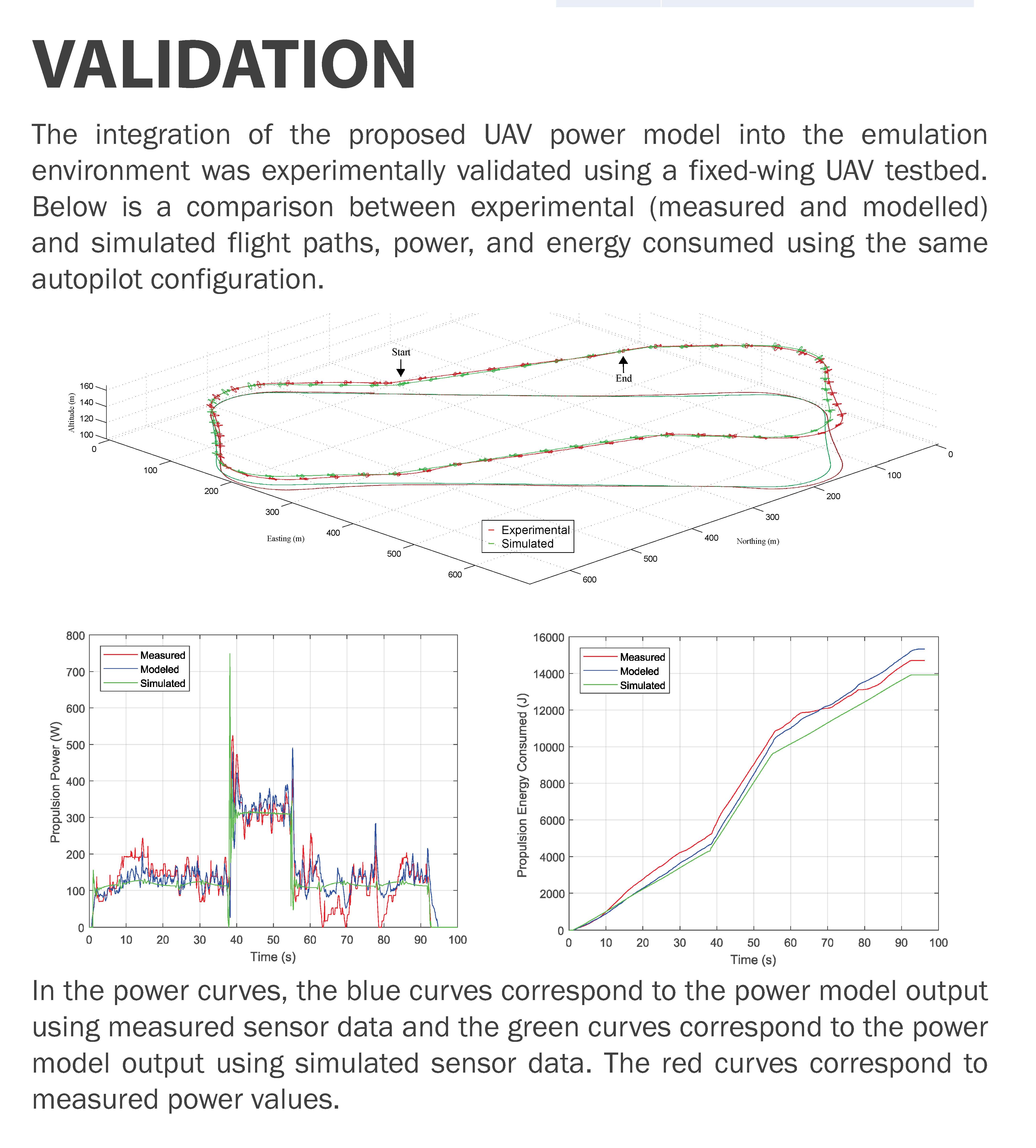
O. Dantsker, M. Theile, and M. Caccamo, "A High-Fidelity, Low-Order Propulsion Power Model for Fixed-Wing Electric Unmanned Aircraft"
in AIAA/IEEE Electric Aircraft Technologies Symposium, Cincinnati, OH, USA, July, 2018.
pdf
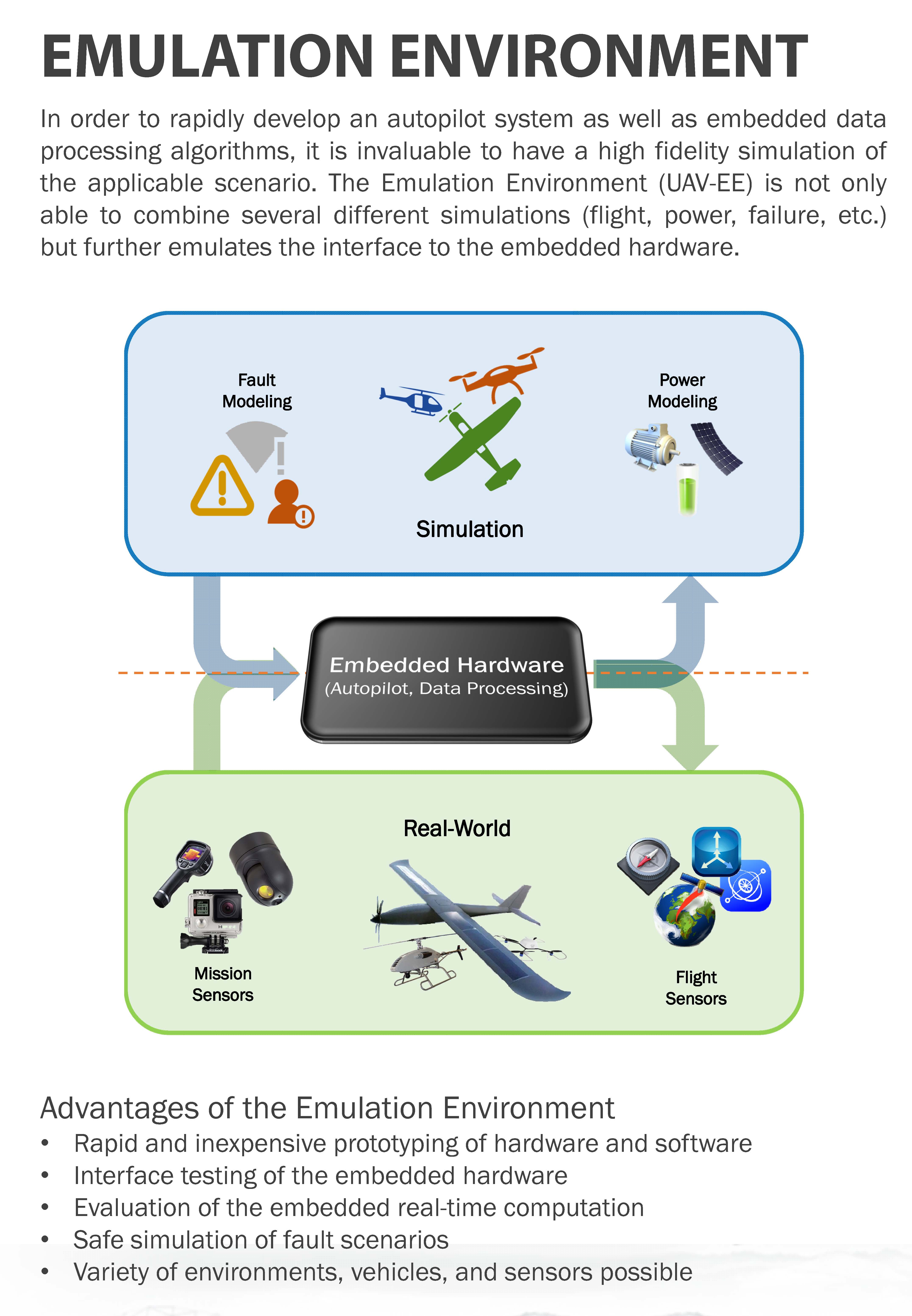
M. Theile, O. Dantsker, R. Nai, and M. Caccamo, "uavEE: A Modular, Power-Aware Emulation Environment for Rapid Prototyping and Testing of UAV"
in IEEE International Conference on Embedded and Real-Time Computing Systems and Applications (RTCSA), Hakodate, Japan, August, 2018.
pdf
O. Dantsker, M. Caccamo, and R. Deters "Propulsion System Testing for a Long-Endurance Solar-Powered Unmanned Aircraft"
in AIAA Aviation and Aeronautics Forum and Exposition, Dallas, TX, USA, June, 2019.
pdf
O. Dantsker, S. Yu, M. Vahora, and M. Caccamo "Flight Testing Automation to Characterize UAV Aerodynamics"
in AIAA Aviation and Aeronautics Forum and Exposition, Dallas, TX, USA, June, 2019.
pdf
O. Dantsker, S. Imtiaz, and M. Caccamo, "Electric Propulsion System Optimization for Long-Endurance and Solar-Powered Unmanned Aircraft"
in AIAA/IEEE Electric Aircraft Technologies Symposium, Indianapolis, IN, USA, August, 2019.
pdf
M. Theile, S. Yu, O. Dantsker, and M. Caccamo, "Trajectory Estimation for Geo-Fencing Applications on Small-Size Fixed-Wing UAVs"
in IEEE/RSJ International Conference on Intelligent Robots and Systems, Macau, China, November, 2019.
pdf
O. Dantsker, M. Theile, M. Caccamo, S. Yu, M. Vahora, and R. Mancuso
"Continued Development and Flight Testing of a Long-Endurance Solar-Powered Unmanned Aircraft: UIUC-TUM Solar Flyer"
in AIAA SciTech Forum and Exposition, Orlando, FL, USA, January, 2020.
pdf
M. Theile, O. Dantsker, R. Nai, M. Caccamo, and S. Yu "uavAP: A Modular Autopilot Framework for UAVs"
in AIAA Aviation and Aeronautics Forum and Exposition, Virtual Forum, June, 2020.
pdf
O. Dantsker, M. Caccamo, R. Deters, and M. Selig "Performance Testing of Aero-Naut CAM Folding Propellers"
in AIAA Aviation and Aeronautics Forum and Exposition, Virtual Forum, June, 2020.
pdf
O. Dantsker, S. Imtiaz, and M. Caccamo "Propulsion System Design, Optimization, Simulation, and Testing for a Long-Endurance Solar-Powered Unmanned Aircraft"
in AIAA Propulsion and Energy 2020 Forum, Virtual Forum, August, 2020.
pdf
O. Dantsker, M. Theile, and M. Caccamo "Integrated Power Modeling for a Solar-Powered, Computationally-Intensive Unmanned Aircraft"
in AIAA/IEEE Electric Aircraft Technologies Symposium, Virtual Forum, August, 2020.
pdf
O. Dantsker, M. Theile, and M. Caccamo "Long Endurance Flight Testing Results for the UIUC-TUM Solar Flyer"
in AIAA Aviation and Aeronautics Forum and Exposition, Virtual Forum, June, 2021.
pdf
O. Dantsker, M. Theile, M. Caccamo, and S. Hong "Integrated Power Simulation for a Solar-Powered, Computationally-Intensive Unmanned Aircraft"
in AIAA/IEEE Electric Aircraft Technologies Symposium, Virtual Forum, August, 2021.
pdf
Contributors

Marco Caccamo
Marco Caccamo is Alexander von Humboldt Professor and head of Institute for Cyber-Physical Systems in Production Engineering at the Technical University of Munich (TUM). He is also adjunct professor of Computer Science at the University of Illinois at Urbana-Champaign. He has chaired Real-Time Systems Symposium and Real-Time and Embedded Technology and Applications Symposium and served as General Chair of Cyber Physical Systems Week. In 2003, he was awarded an NSF CAREER Award. He is IEEE Fellow.
Email Website
Or Dantsker
Or Dantsker is an Assistant Professor in the Department of Intelligent Systems Engineering at Indiana University Bloomington. He graduated in 2021 with a Ph.D. in Aerospace Engineering from the University of Illinois at Urbana-Champaign. His research interests include experimental aerodynamics and system integration of unmanned aircraft, particularly focusing on long-endurance solar flight. Or is also the co-founder of Al Volo LLC, which produces data acquisition systems for UAVs as well as other applications.
Email Website
Mirco Theile
Mirco Theile is a Ph.D. student at the Department of Computer Science and an Associate Researcher at the Chair for Cyber Physical Systems in the Department of Mechanical Engineering at the Technical University of Munich. Mirco employs simulation methods for the development of control and planning algorithms focusing on reinforcement learning for cyber-physical systems.
Email Website

Simon Yu
Simon is a doctoral candidate in the Department of Electrical and Computer Engineering at University of Illinois Urbana-Champaign. He is currently a graduate research assistant working for Professor Lui Sha on autonomous and cyber-physical systems including unmanned aerial vehicles, self-driving cars, and more.
Email
Saym Imtiaz
Saym Imtiaz is an undergraduate student studying Aerospace Engineering at the University of Illinois at Urbana-Champaign. His research interests include system optimization of unmanned aircraft.
Derek Lai
Derek Lai is an undergraduate student studying Engineering Mechanics at the University of Illinois at Urbana-Champaign.
Andrew Louis
Andrew is an Embedded Software Engineer at Bell Helicopters. He graduated in 2017 with a M.S. in Computer Science from the University of Illinois at Urbana-Champaign.

{kind=link}
{kind=link}

Richard Nai
Richard Nai is a Master's student in the Department of Computer Science and a Research Associate at the Chair for Cyber Physical Systems in the Department of Mechanical Engineering at the Technical University of Munich. Richard is currently developing various support infrastructure for AI controllers for cyber physical systems.
Email
Daniel Amir
Daniel is an undergraduate student studying Computer Science and Engineering Physics at the University of Illinois at Urbana-Champaign.

Ned Ellis
Ned Ellis is a sophomore undergraduate studying Electrical Engineering at UIUC. He is interested in integrating ML/AI techniques with Control Theory to enable smart air and space borne platforms. He also enjoys RTOS development for embedded systems and their use in reaching these goals.
Seongyong Hong
Seongyong is an undergraduate student studying Aerospace Engineering at the University of Illinois at Urbana-Champaign.
Arjun Nijhawan
Arjun is an undergraduate student studying Computer Engineering at the University of Illinois at Urbana-Champaign.
Raimi Shah
Raimi is an undergraduate student studying Computer Engineering at the University of Illinois at Urbana-Champaign.
Jack Yang
Jack is an undergraduate student studying Computer Engineering at the University of Illinois at Urbana-Champaign.
Sponsors
This research is supported by the
University of Illinois at Urbana-Champaign.
This research is supported by the
Technical University of Munich.
This research is supported by the National Science Foundation
through grant CNS-16-46383.
This research is supported by the Alexander von Humboldt Professorship endowed by the German Federal Ministry of Education and Research.