Emulation Environment
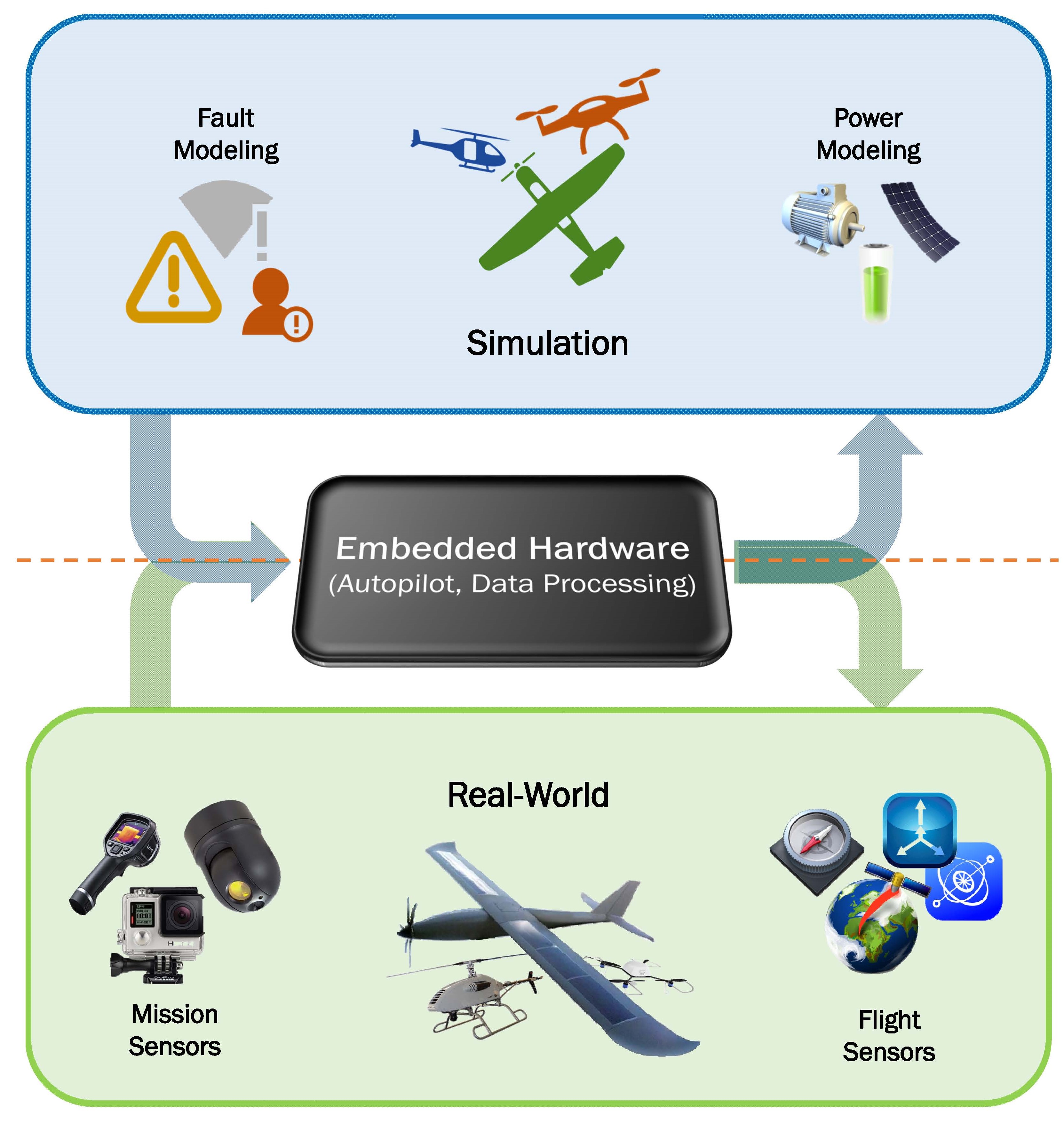
In order to rapidly develop an autopilot system as well as embedded data processing algorithms, it is invaluable to have a high fidelity simulation of the applicable scenario. The Emulation Environment (UAV-EE) is not only able to combine several different simulations (flight, power, failure, etc.) but further emulates the interface to the embedded hardware.
Advantages of the Emulation Environment: • Rapid and inexpensive prototyping of hardware and software • Interface testing of the embedded hardware • Evaluation of the embedded real-time computation • Safe simulation of fault scenarios • Variety of environments, vehicles, and sensors possible
Tutorial Abstract
Unmanned Aerial Vehicles (UAVs) are becoming more and more popular as their abilities and applications grow quickly. From camera drones for agricultural observation to delivery systems, the range of possible applications is increasing. Therefore, the flexibility of testing and development tools is essential to rapidly develop prototypes and testing them in different application scenarios. To enable rapid prototyping we present the Unmanned Aerial Vehicle Emulation Environment (UAV-EE) that allows for fast, inexpensive, and flexible development and testing of software and hardware designs. Research groups that want to focus their work on UAV research need to overcome several hurdles to get started. Before blindly starting the development and investing funds in expensive hardware, several questions need to be answered. For example, assume you want to develop a UAV based system that can temporarily increase LTE availability in specific areas (e.g. public events). Which type of aircraft should you pick? A drone can hover in place but a small airplane uses less power to stay in the air. How do you want to control the drone(s), manually or with an autopilot that is optimizing for LTE availability? And most important, how do you test it? A flight test is time consuming and costly, and can be a safety hazard if the software or embedded hardware is flawed. Our Robot Operating System (ROS) based open source UAV Emulation Environment aims to help answer these and more questions arising by providing a modular environment that not only allows flight dynamics simulation but also scenario specific simulations. The proposed open-source environment will have a growing availability of specific simulation modules, which include a power model to estimate electric power consumption of the simulated UAV, a crucial metric for most UAV projects. Furthermore, the interface to the embedded hardware emulates the sensor and actuator interface, which gives the possibility to analyze the embedded hardware and software from a real-time schedulability perspective. In addition to be a cost effective tool, software debugging in a simulated test phase is a lot easier and faster than in the real world. This tutorial aims to introduce the Unmanned Aerial Vehicle Emulation Environment, showing its abilities and potentials for UAV based research and education projects. We will present different test scenarios to show the flexibility of the UAV-EE. The tutorial especially targets newly started UAV projects in research and education to help them bootstrap the development phase. Established projects can also benefit from UAV-EE and we aim to establish a growing community that uses UAV-EE to further improve research efficiency and cooperation. Topics that will be covered in the tutorial will include: • Demonstrate the Unmanned Aerial Vehicle Emulation Environment (UAV-EE) • Present different testing scenarios • Show the flexibility of the design • Illustrate the hardware and software structure of the Emulation Environment • Tutorial on how to migrate existing UAV software to run on UAV-EE
Organizers

Marco Caccamo
Marco is a Professor of Computer Science at the University of Illinois at Urbana-Champaign. He also has courtesy appointments in the Coordinated Science Lab (CSL) and the Department of Aerospace Engineering at the University of Illinois. He has chaired Real-Time Systems Symposium and Real-Time and Embedded Technology and Applications Symposium and served as General Chair of Cyber Physical Systems Week. He is an IEEE fellow and recipient of the Humboldt Professorship.
Email Website
Or Dantsker
Or is a PhD student in the Department of Aerospace Engineering at the University of Illinois at Urbana-Champaign. His research interests include experimental aerodynamics and system integration of unmanned aircraft, particularly focusing on long-endurance solar flight. Or is also the co-founder of Al Volo LLC, which produces data acquisition systems for unmanned aircraft as well as other applications.
Email Website

Mirco Theile
Mirco is a Masters student in the Department of Electrical and Computer Engineering at the Technical University of Munich. In the scope of international education and research, he is a research scholar at the University of Illinois at Urbana-Champaign working on a power-aware autopilot for a long-endurance solar UAV.
Email Website
Sponsor
This research is supported by the National Science Foundation
through grant CNS-16-46383.